热点资讯
其他资讯
- 芜湖8402模具钢螺丝线、8402种类齐全##螺丝线恒鑫报价
- 邢台巨鹿锅炉颗粒燃料锯末刨花颗粒吨包装
- 石家庄弹簧钢棒SUP13冲压钢板、SUP13材料介绍##富宝金属
- 新县烟囱升降机生产厂商_江苏海工重工产品出口新加波
- 玉溪DD8国标高温合金钢非标定做、DD8淬火处理##鼎盛报价
- 衢州Inconel718镍基合金光圆板材Inconel718镍基合金货全
- 云浮$金属CuNi30Fe小圆CuNi30Fe零售处
- 宁夏Y35易车削钢扁条材料、Y35现货供应】##恒鑫报价
- 平湖档案选层柜档案密集架安装
- 囊谦阻燃聚氨酯瓦壳电话##多少钱一吨
- 金属40Mn18Cr4V零售处40Mn18Cr4V180.0199.2776
交货期快机电伺服式ZPLE160-L2-15-S2-P2平行轴伺服减速机
文章来源:ymcdkj
发布时间:2024-05-06 14:12:04
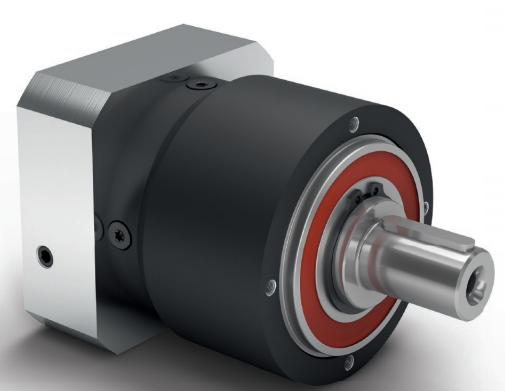
S2-P2平行轴伺服减速机
稳压器在DSP器中的应用设计人员在选择DSP电源时首先需选定的类型。稳压器可分为两大类,即线性稳压器和关稳压器。由于采用了由一个导通元件和一个误差放大器组成的简单拓扑结构,线性稳压器易于使用。线性稳压器的主要优点是,由于通常环路带宽较高,输出噪声低且瞬态性能较好,主要缺点是在大负载和在输入和输出之间压差较大时效率低。线性稳压器功耗的计算公式为:输入电压通常为5V或3.3V,输出电压则降至1.V至1.2V。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
行星减速机是一种应用广泛的减速机,它的主要传动结构为:行星轮,太阳轮,外齿圈,并合着线针齿啮合的转动方式来工作。 由于减速机的这种转动结构,使得它的单级减速一般在3-10之间,常见减速比为:3.4.5.6.8.10 。行星减速机是由针齿啮合来工作转动的,由于行星齿轮的套数一套齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求,但同时2级或3级减速机的长度会有所增加,导致效率会有所下降。 前面说过它主要传动结构为:行星轮,太阳轮,外齿圈 ,使得行星减速机多数是在步进电机和伺服电机上,行星我们都知道行星是围绕着太阳运动的有着不同的轨迹方式,同样行星减速机的这种结构也决定了它的几种不同工作转动方式: 1)太阳轮固定,齿圈主动,行星架被动,它的转向相同这种组合为降速传动,传动比一般为1.25~1.67 2)齿圈固定,行星架主动,太阳轮被动,它的转向相同这种组合为升速传动,传动比一般为0.2~0.4 3)齿圈固定,太阳轮主动,行星架被动,它的转向相同这种组合为降速传动,通常传动比一般为2.5~5 4)太阳轮固定,行星架主动,齿圈被动,它的转向相同这种组合为升速传动,传动比一般为0.6~0.8 5)行星架固定,齿圈主动,太阳轮被动,它的转向相反这种组合为升速传动,传动比一般为0.25~0.67 6)行星架固定,太阳轮主动,齿圈被动,它的转向相反这种组合为降速传动,传动比一般为1.5~4 由于结构的原因,使得它的传动种类不同能广泛应用于各类传动机械行业中。
谐波减速器的主要缺点 1.传动比的下限值高,齿数不能太少,当波发生器为主动时,传动比不小于35; 2.柔轮和波发生器的复杂,需要专门设备,造成单件生产和维修困难,但批量生产时谐波传动装置的价格低于行星传动装置; 3.柔轮周期性变形,易于疲劳损坏; 4.起动力矩大; 5.在承载初始阶段,刚度较小,变刚度特性是属于带条件性的缺点; 6.不能成交叉轴和交错轴的结构形式。 4.3 谐波传动与其它传动性能的具体比较 蜗轮蜗杆减速机的主要特点是具有反向自锁功能,可以有较大的减速比,输入轴和输出轴不在同一轴线上,也不在同一平面上。但是一般体积较大,传动效率不高,精度不高。谐波减速机的谐波传动是利用柔性元件可控的性变形来传递运动和动力的,体积不大、精度很高,但缺点是柔轮寿命有限、不耐冲击,刚性与金属件相比较差。输入转速不能太高。行星减速机其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以的很大。但价格略贵。
目前,国外小模数精密谐波齿轮减速器多采用短筒柔轮,其体积小、重量轻、承载能力高;我国采用的还是普通杯形柔轮,还没有生产短筒柔轮谐波齿轮减速器。
S2-P2-P1